Multi-Robot Collision Avoidance
Overview
Leading independent research comparing Dissipative Avoidance Feedback (DAF), Artificial Potential Fields (APF), ORCA, and Control Barrier Functions (CBF) across path, cycle, and complete graph topologies. DAF proved to deliver the smoothest trajectories with zero collisions and no artificial equilibria. Identified a novel gap: bearing-only sensing (GPS-free) + DAF + consensus on general graphs. This is now the PhD direction — developing a bearing-based DAF controller using only bearing vectors and communicated velocities.
Key Highlights
Gallery

Scenario A: 2-robot head-on encounter — DAF produces smooth avoidance while APF shows jerky repulsion
Deep Dive
Research Motivation
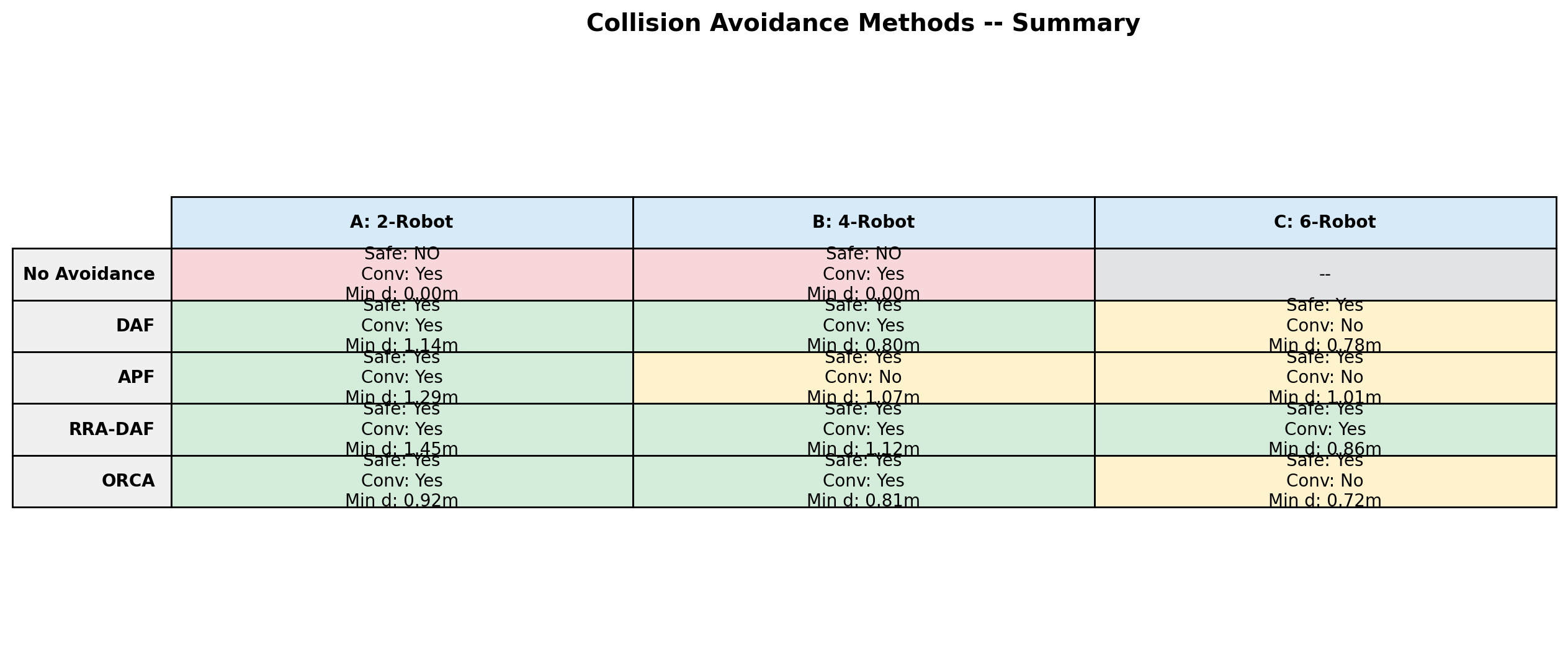
Multi-robot systems need collision avoidance that scales gracefully without creating artificial equilibria or jerky trajectories. Existing methods like Artificial Potential Fields (APF) suffer from oscillatory repulsion near obstacles, while ORCA requires global velocity knowledge. This research systematically compares four approaches — DAF, APF, ORCA, and Control Barrier Functions (CBF) — across path, cycle, and complete graph topologies to identify the best candidate for real-world deployment.
Why DAF Wins
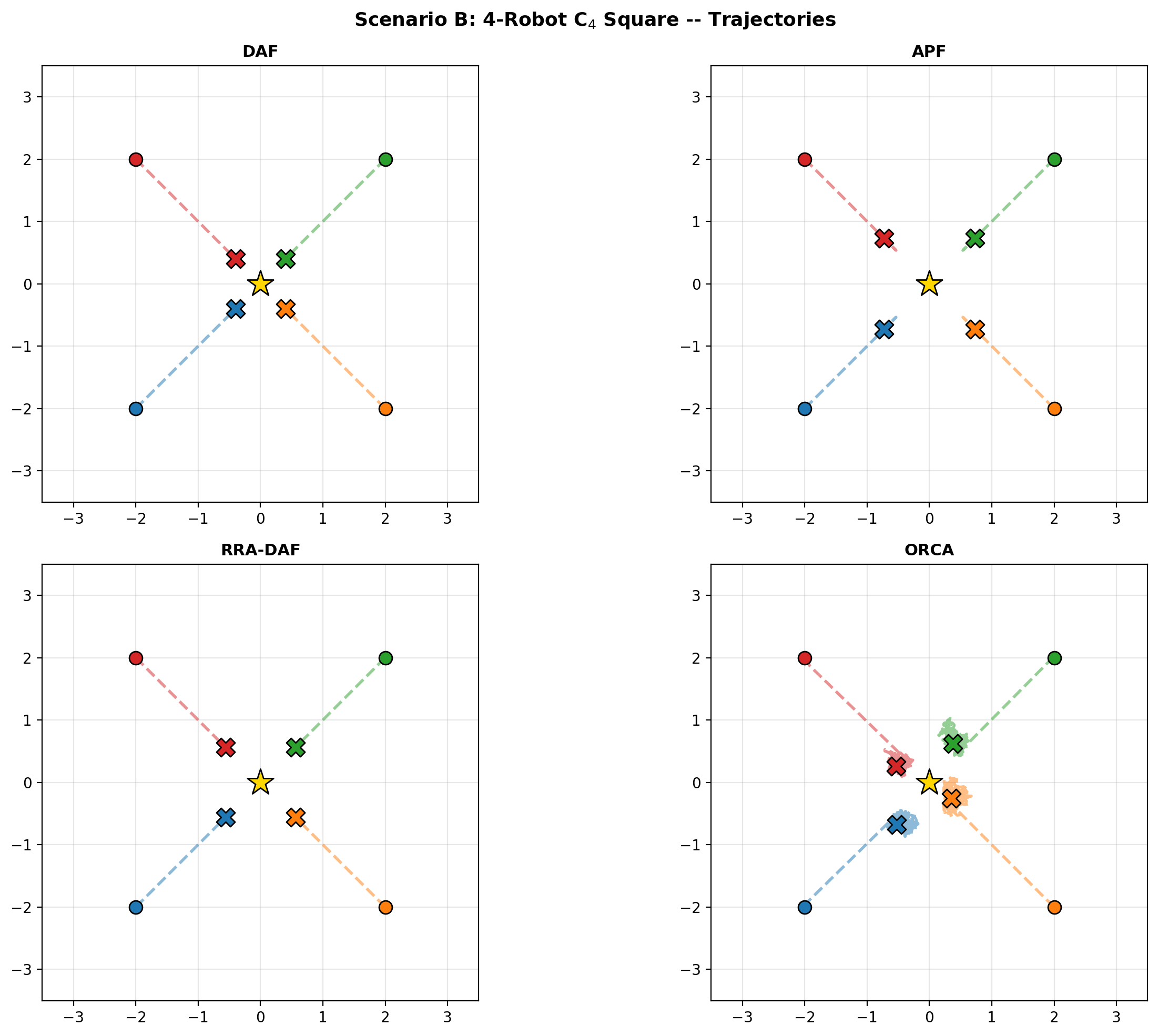
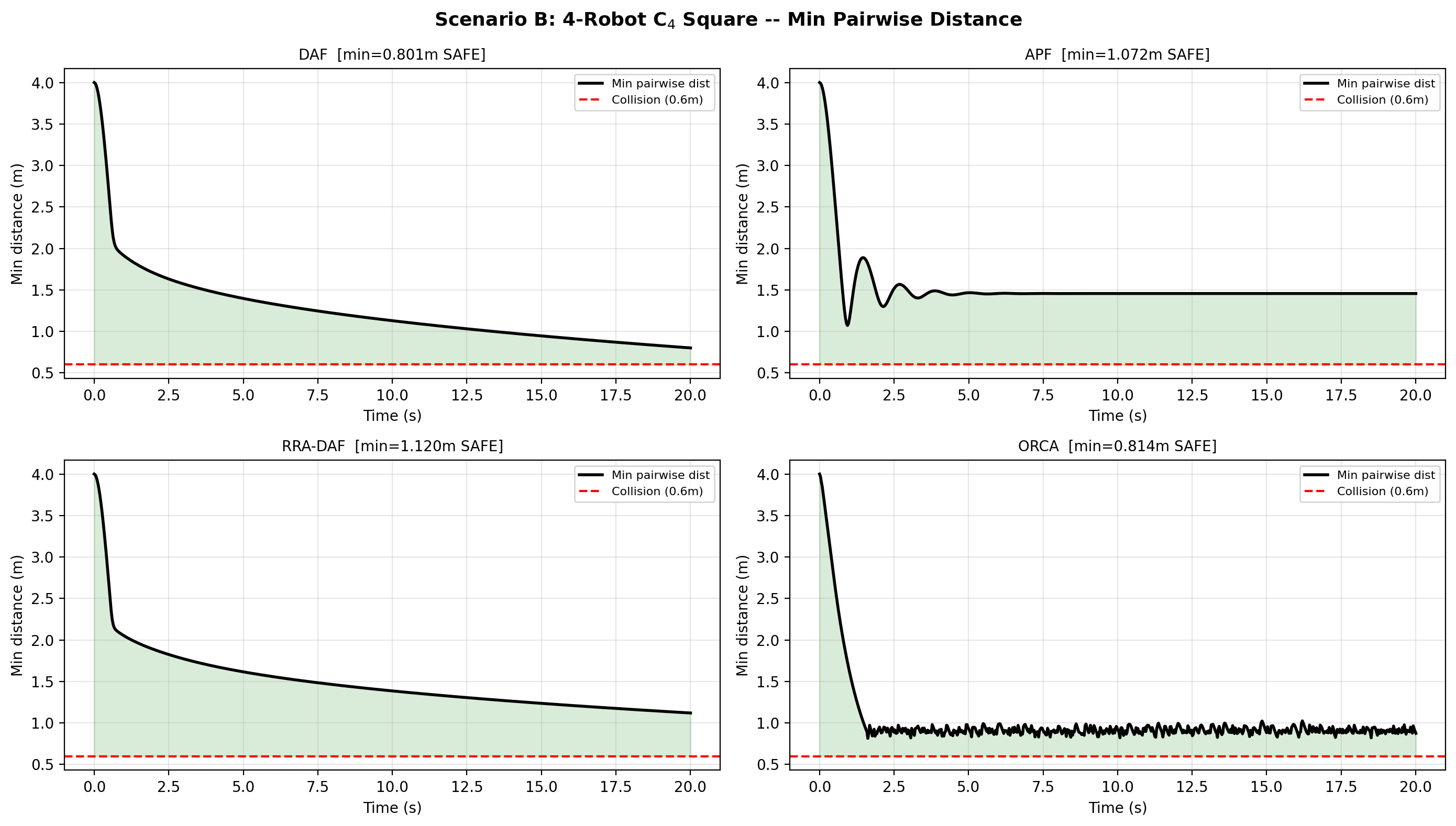
Dissipative Avoidance Feedback proved superior across all tested scenarios. Unlike APF which produces jerky repulsion forces, DAF generates smooth avoidance trajectories by dissipating kinetic energy through velocity-dependent braking. The smoothstep gamma function provides a continuous transition between free motion and avoidance behaviour. In the 8-robot complete graph scenario, DAF maintained inter-robot spacing with zero collisions and the lowest energy consumption of all four methods.
Bearing-Only Formation Control
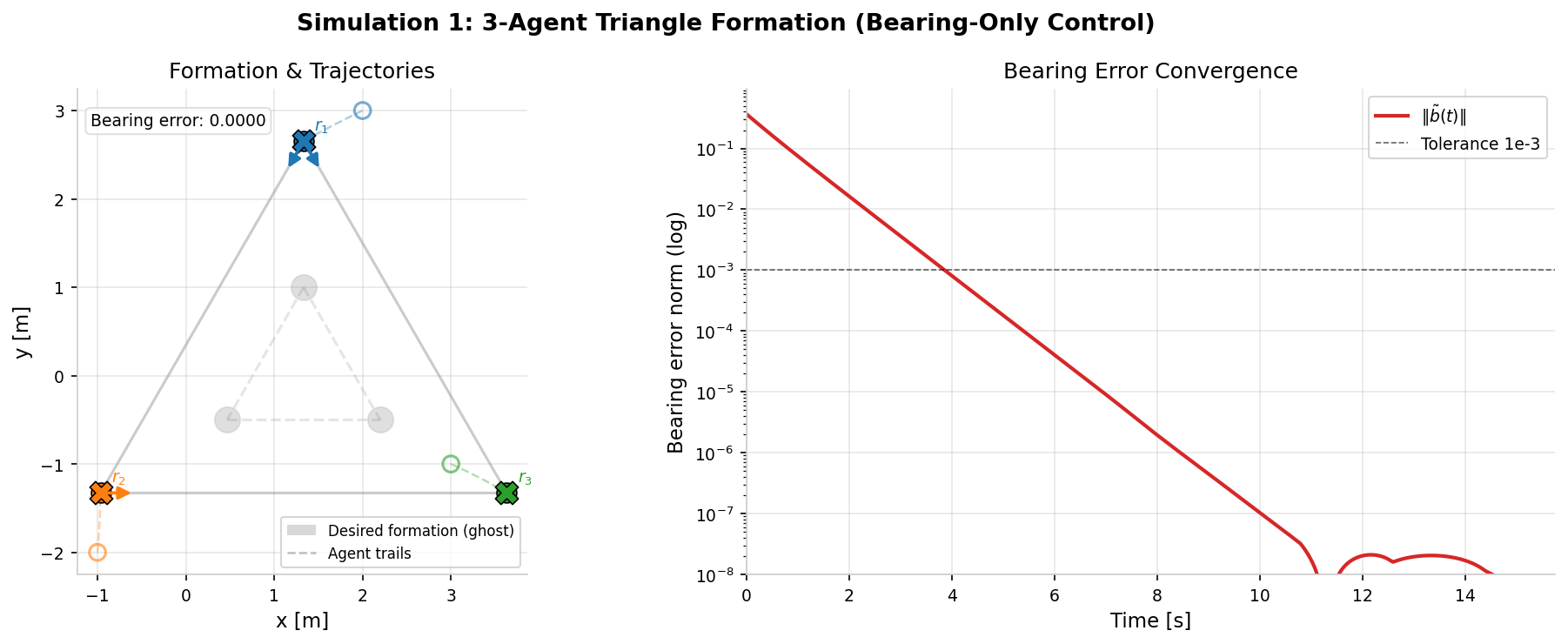
The novel research direction: can robots achieve formation control using only bearing measurements — no GPS, no distance sensors? Simulations confirm that bearing-based control laws converge for rigid communication graphs. A 3-agent triangle (K3) and 4-agent square (K4) both achieve their desired formations from scattered initial positions using only the angles to their neighbours.
Why Graph Rigidity Matters
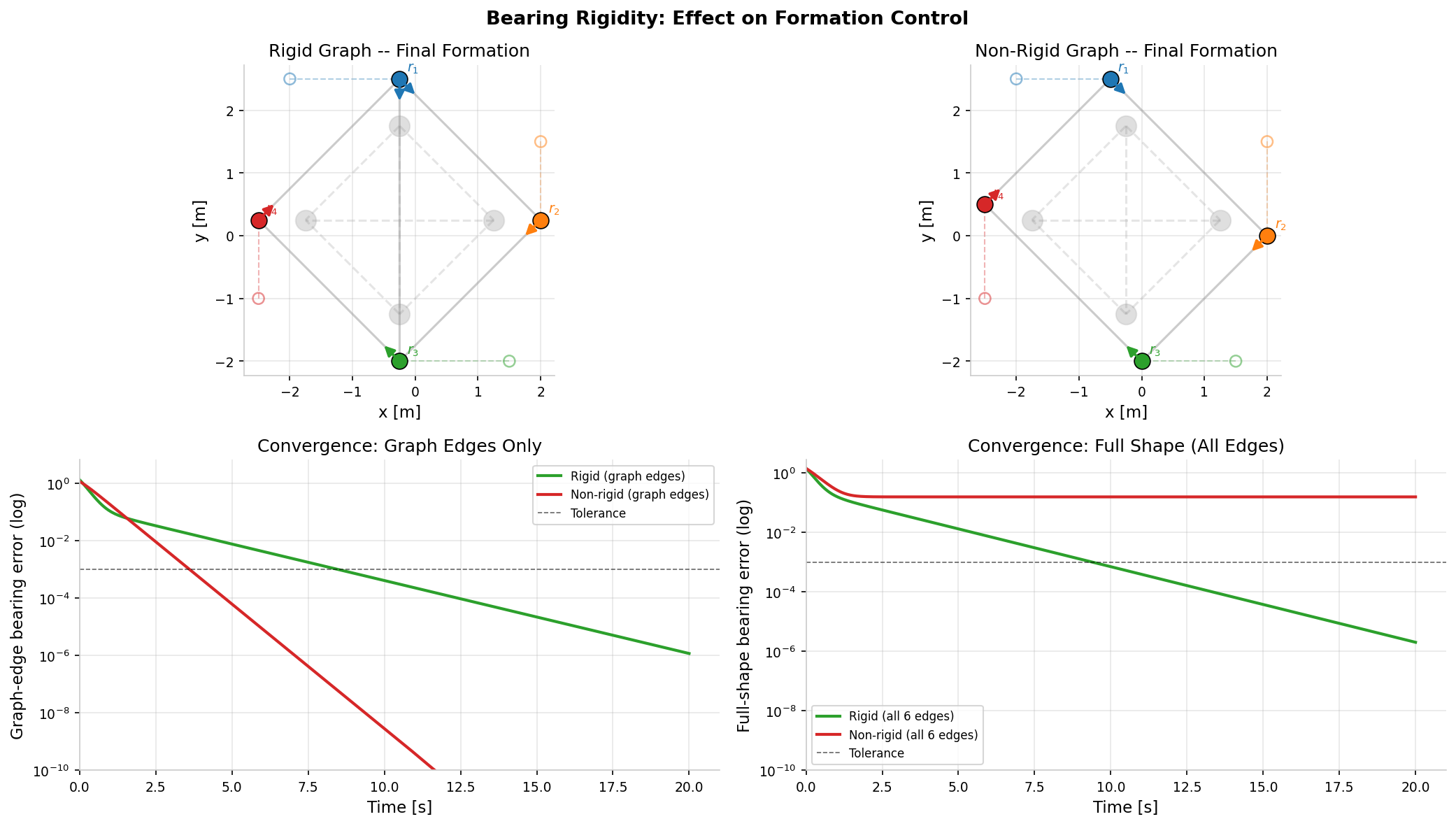
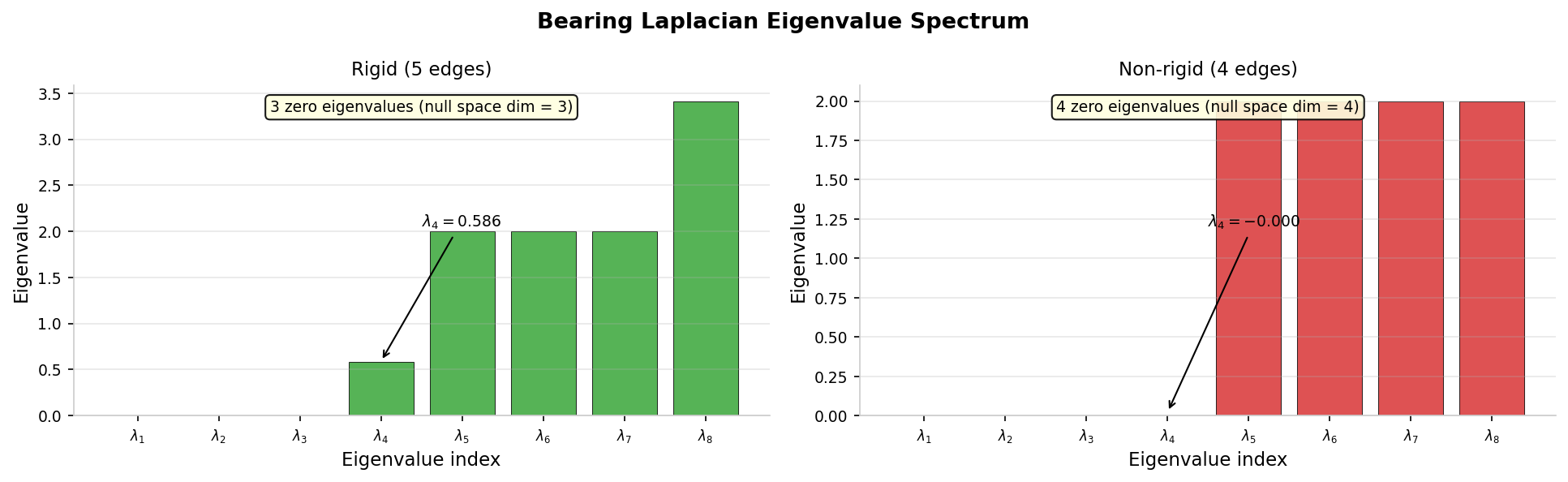
Not all communication graphs can support bearing-only formation control. A graph must be infinitesimally bearing rigid (IBR) — meaning the bearing Laplacian has the correct rank. A rigid graph with 5 edges (λ4 = 0.586) preserves the full formation shape, while a non-rigid graph with only 4 edges (λ4 = 0) converges on its own edges but deforms the overall shape. The non-rigid full-shape bearing error stays at 0.156, proving the formation is distorted even though individual edge bearings are satisfied.
Eigenvalue Analysis
The bearing Laplacian eigenvalue spectrum reveals whether a graph is infinitesimally bearing rigid. For the rigid graph, λ4 = 0.586 > 0, confirming IBR. For the non-rigid graph, λ4 = 0, meaning the graph has a non-trivial kernel and cannot preserve arbitrary formations. This spectral analysis provides a computationally efficient way to verify rigidity before deployment.
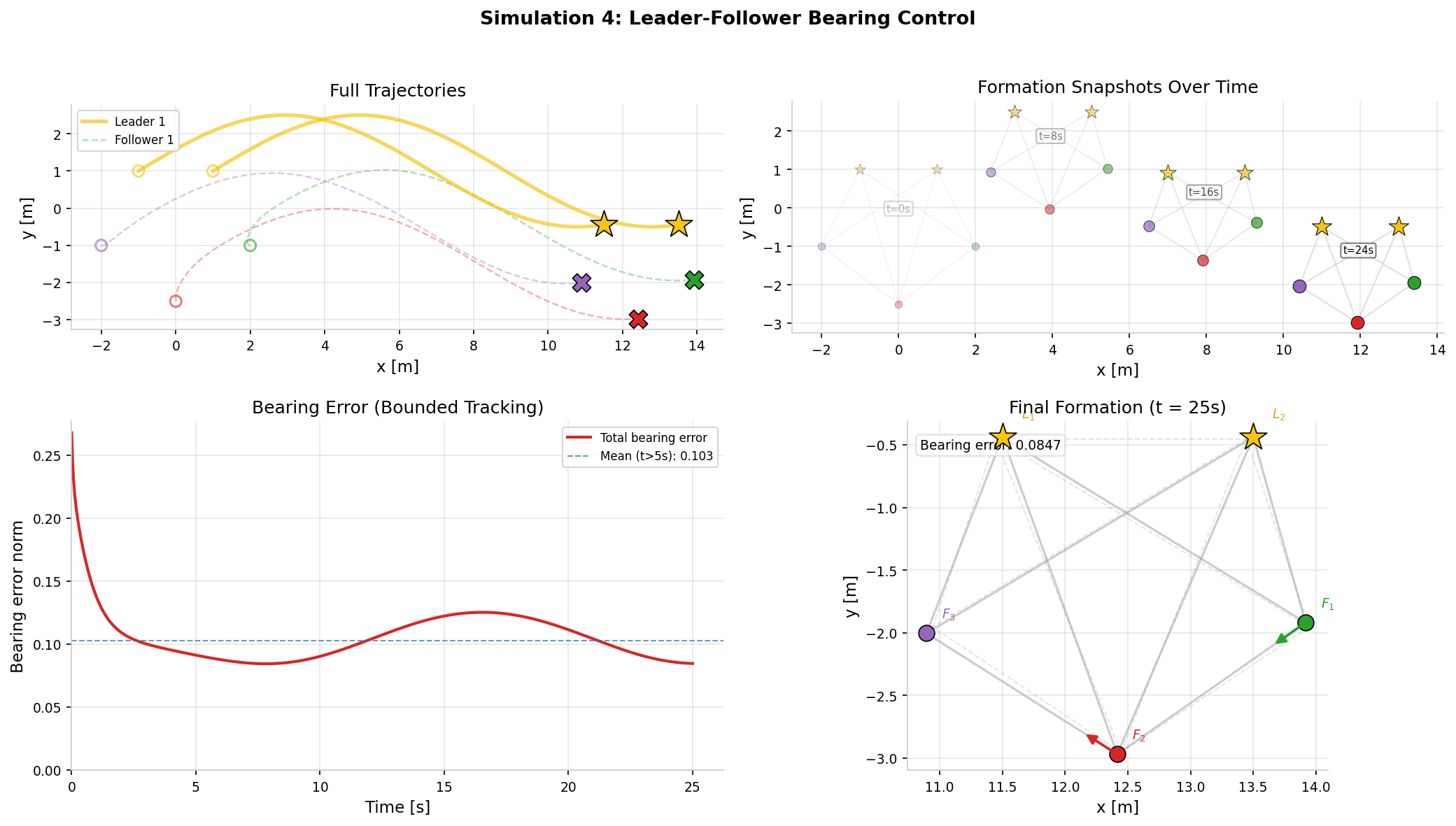
Leader-Follower Tracking
In practical deployments, some robots act as leaders with known trajectories while followers maintain formation using only local bearing measurements. Simulation 4 demonstrates 2 leaders and 3 followers: the followers track a moving formation with bounded tracking error, using only bearing vectors from their communication neighbours. This validates the control law for dynamic scenarios beyond static consensus.
The Novel Research Gap — PhD Direction
Through this comparative study, a novel gap was identified: bearing-only sensing (GPS-free) combined with DAF consensus on general communication graphs. Current DAF implementations assume full position knowledge, but in GPS-denied environments (indoor, underwater, underground), robots can only measure bearing vectors to neighbours. Developing a bearing-based DAF controller using only bearing vectors and communicated velocities is now the PhD research direction, supervised by Dr. Zhiqi Tang at the University of Manchester.
Formal Lyapunov Analysis
Each algorithm was validated through formal Lyapunov stability proofs and energy-based safety analysis. The Lyapunov function V decreases monotonically along system trajectories, guaranteeing asymptotic convergence to consensus. Safety is proven by showing inter-robot distances never drop below the specified safety radius for all time t ≥ 0.
Interactive Lab
DAF Navigation — Collision Avoidance in Action!
Watch 4 robots navigate around a central obstacle using the exact DAF control law from the research. Smoothstep gamma function, velocity-dependent braking, inter-robot and obstacle avoidance.