01
MECHANICAL DESIGN3rd Year Capstone
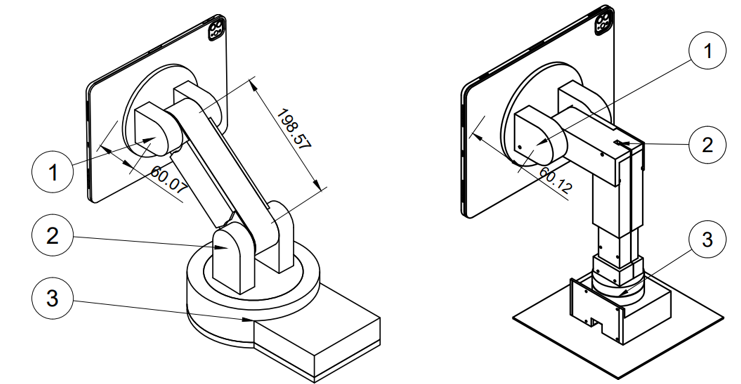
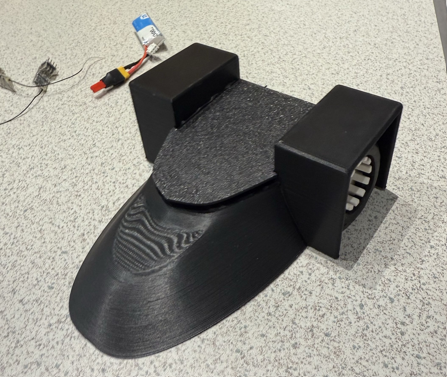
Head-Tracking Monitor Arm
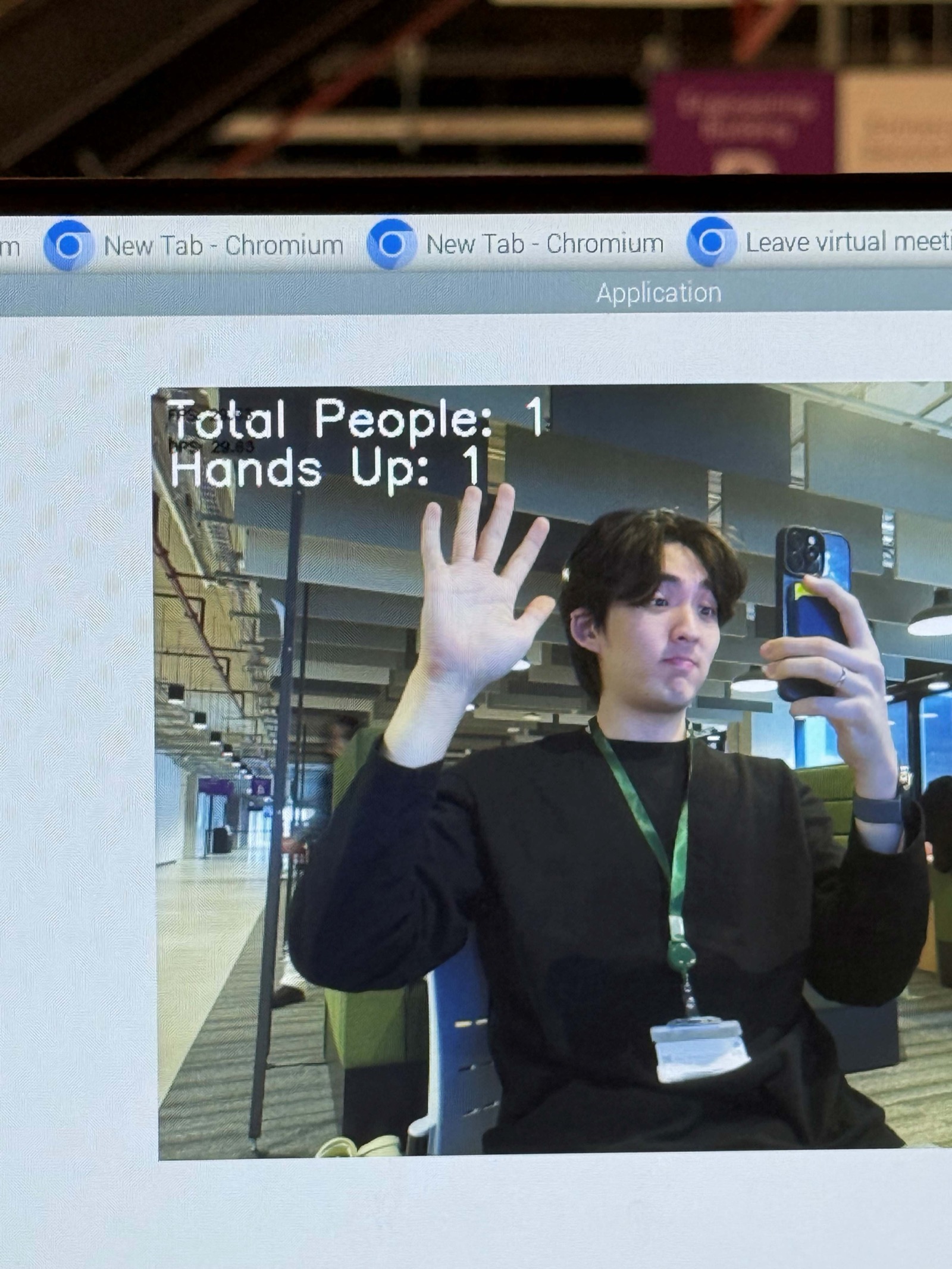
Real-time head-position tracking system that adjusts monitor angle using computer vision — exploring RRR vs RPR joint configurations.
PythonOpenCVRaspberry Pi 5Fusion 360PWM
View Project
Gallery